智平方携手民企500强西子联合,打通人形机器人全场景闭环
- 更新时间 2026-04-17 19:09:40

在具身智能产业竞争全面白热化的2026年,一个根本性问题日益清晰:机器人算法的差距正逐渐缩小,而场景的鸿沟却因数据、泛化能力等困境持续拉大。因此,大多企业选择“做减法”,锁定单一赛道,把特定场景打磨到极致。
而此时,一家国内通用具身智能企业——智平方却走上不同的路径。4月15日,智平方与西子联合达成合作,其通用智能机器人“爱宝”走进了西子集团旗下企业最具挑战性的工业腹地,更在西子智慧产业园这座“微型城市”承担起咖啡制作、运维巡检、后勤物流等公共服务职能,让通用具身智能真正走向了真实场景验证。
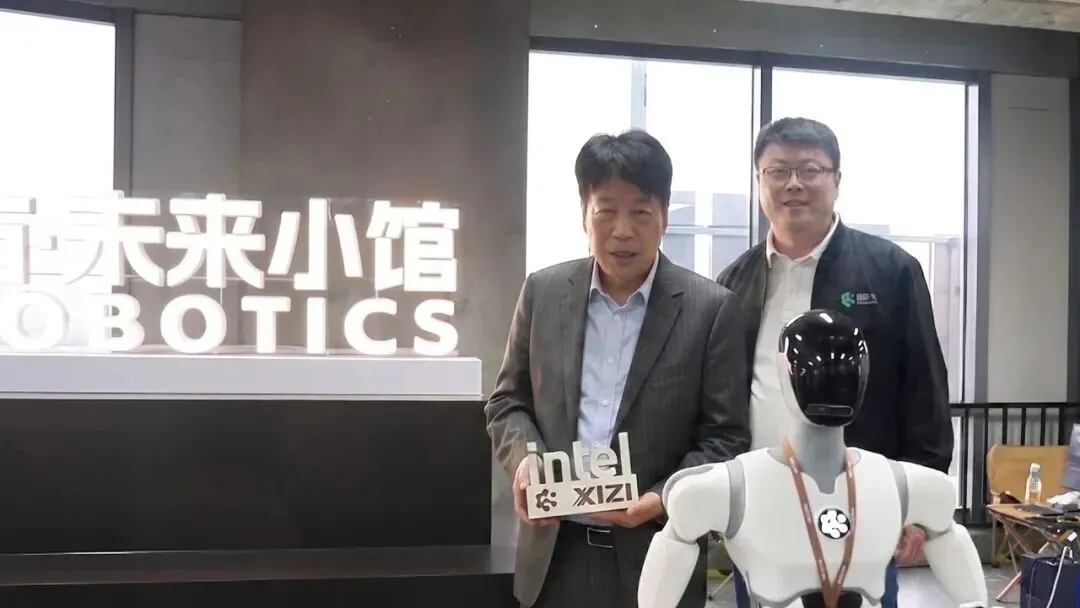
西子联合董事长王水福(左)与智平方创始人兼CEO郭彦东(右)

跨越工业与公共服务的场景极差
此次合作的核心看点,在于西子为智平方人形机器人提供了两个性质截然不同的真实场景考验。
其一,是工业制造的极限考场。西子联合作为一家以装备制造为根基、横跨电梯、锅炉、航空、盾构机、商业等多个领域的综合型企业,连续22年蝉联中国民营企业500强。旗下的西子航空更是C919大飞机九家机体供应商中唯一的民营企业,承担着中机身段含中央翼盒这一技术最复杂、精度要求达到亚毫米级的核心部段。
机器人在这里的挑战不是“能不能抓取”,而是“零容错”,任何偏差都意味着部件报废。更棘手的是,大量工序是非标准化的,零件形态各异、操作空间狭小,传统自动化设备几乎束手无策。
其二,是西子智慧产业园在公共服务场景的泛化考场。这座40万平方米的“微型城市”集生产、办公、商业、生活于一体,涵盖商超、图书馆、运动场馆等超50个真实场景。这里的挑战与航空产线截然相反。机器人需要应对高频人机交互、多任务实时切换以及持续动态变化的环境。

行业内普遍认为,这两个场景需要两套完全不同的技术方案。航空制造要求极限精度和结构化操作,园区服务要求泛化能力和动态适应。但智平方选择用同一个GOVLA大模型,将“爱宝”人形机器人同时部署于西子航空的产线和西子园区的咖啡厅。成为行业内一次极具挑战性的技术验证。

智平方通用模型如何超越专用方案?
专用机器人的常见路径是:为特定工序定制视觉、力控与轨迹,精度较高,但更换场景后往往需要重新开发。这种模式在固定、重复的任务中表现稳定,但面对多样化的真实环境时,适应性受限。
而智平方GOVLA大模型采用了不同的思路。它不预设任务,而是通过多模态感知理解当前环境,再基于大模型的推理能力生成操作方案。这意味着“爱宝”不是执行预设程序,而是在每次任务中动态调整。

在西子航空产线中,“爱宝”面对非标零件和狭小空间,无需重新编程即可完成分拣、拧紧、检测等工序;在西子园区咖啡厅,同一台“爱宝”机器人面对真实客流和动态环境,独立完成从制作到交互的全流程。同一个模型充分驾驭了两个差异显著的场景,印证了智平方通用智能路径的独特价值。

行业常谈“数据飞轮”,但其却存在一个隐秘的陷阱——单一场景的数据积累存在边界。这导致模型在熟悉环境中表现良好,换到不同场景后能力可能明显下降。因此,具身智能真正的数据护城河不是拼量,而是拼多样性。
智平方的场景布局以追求维度为核心,从汽车、半导体到航空制造,从新零售到园区服务,每个场景都为其模型提供不同维度的训练信号,这正是智平方在通用智能路径上逐步建立的竞争壁垒。