18个月、60磅、世界500强:这支苹果+SpaceX+NASA混编团队,交出了第一份答卷
- 更新时间 2026-03-12 17:40:11
最近,硅谷又冒出一家#机器人 公司。
它的名字叫Noble Machines,前身是Under Control Robotics。刚结束隐身模式,就甩出一份还算不赖的成绩单:
成立18个月,首款人形机器人Moby已经交付给一家财富全球500强客户。

这个节奏,比大多数同行都快。
看团队背景,确实有“快”的底气:创始团队来自苹果、SpaceX、NASA和加州理工。做消费电子、做火箭、做航天器的凑一块,捣鼓起#机器人。
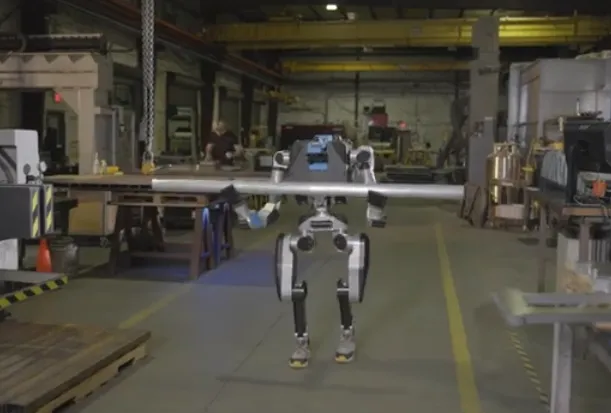
他们做的机器人叫Moby。有几个数字值得看一眼:
负载60磅(约27公斤)。对比一下同行先:Agility的Digit是35磅,Figure 03是44磅,Boston Dynamics的新Atlas是66-110磅(上限高但那是Atlas)。Moby卡在一个挺实用的区间——比多数竞品能扛,又没为了极限负载牺牲灵活性。
还能爬陡坡,能在户外环境跑。
但真正让我在意的,不是这些参数,是他们做#机器人 的思路。
CEO魏鼎说了一句话:“解决所有维持世界运转的危险且体力消耗巨大的工业任务。”
翻译过来就是:哪儿脏、哪儿累、哪儿危险,我们就去哪儿。
这不是一句口号。他们选的应用场景是制造业、物流、建筑、能源、半导体——全是“重工业”,全是“人不想干或人干太危险”的地方。
技术路线上,他们也跟主流也不太一样。
现在很多人形公司在拼“类人”——走路像人、手势像人、表情像人。Noble Machines不太 care 这个。他们强调的是“全身AI控制”和“端到端自主”。
几个技术点来看一下:
多模态学习:可以用自然语言教,可以用动作演示教,可以用手势教。学一个新技能,不用几个月,也就几小时搞定。
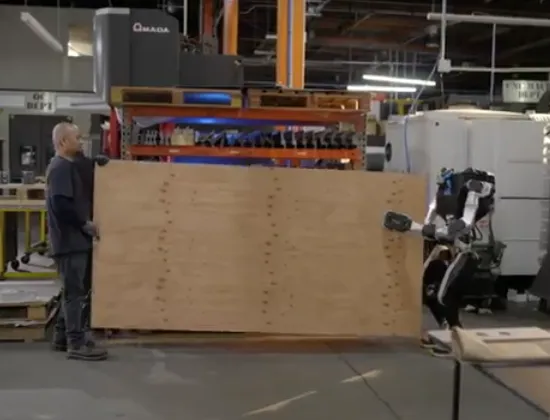
AI驱动的全身控制:在复杂工业环境里保持稳定,不是光站着不摔,是干活的时候不晃。
硬件-AI协同设计:不是先做硬件再往里塞AI,是一开始就捏在一起想。
这套打法,已经吸引了一些工业伙伴。ADLINK(凌华)、舍弗勒、所罗门都在跟他们合作。舍弗勒的人说得很直接:“能扛高负载、能无缝部署的通用机器人,正是我们需要的。”
🔎
Noble Machines的“反常”,恰恰点出了具身智能落地的一个关键矛盾:要像人,还是要能干活?当很多公司还在卷“双足走路多稳、手指多灵活”的时候,他们选择了另一条路——以任务为中心,以扛造为核心。这种“反人类设计”思路(不是反人性,是反“类人”),可能更早跑通商业闭环。毕竟,工厂老板买机器人,不是为了看它走路像人,是为了让它把货搬完、把活干完。我们在追赶的时候,或许也该想想:我们到底要造“更像人的机器人”,还是造“更能干活的工具”?
如果让你选,你是更看重机器人“像人”的那一面,还是“能干重活”的那一面?
➡️ 延伸体验 /观看动态演示,请关注小绿书关联视频号【曦望者】
如果本文有启发,请点 👍 与 ❤️ 支持我们!
